
 5秒后页面跳转
5秒后页面跳转

| 型号 | 品牌 | 获取价格 | 描述 | 数据表 |
| PD-109-57 | TRINAMIC |
获取价格 |
57mm / NEMA23 Stepper Motor with Controller / Driver and Serial Interface |

|
| PD10DR | RENESAS |
获取价格 |
Renesas 32-Bit RISC Microcomputer SuperHTM RISC engine Family/SH7144 |
|
| PD10GE159 | DIODES |
获取价格 |
PECL Output Clock Oscillator, 159.375MHz Nom, ROHS COMPLIANT, CERAMIC, SMD, 6 PIN |
|
| PD10GE159 | PERICOM |
获取价格 |
PECL Output Clock Oscillator, 159.375MHz Nom, ROHS COMPLIANT, CERAMIC, SMD, 6 PIN |
|
| PD10IOR | RENESAS |
获取价格 |
Renesas 32-Bit RISC Microcomputer SuperHTM RISC engine Family/SH7144 |
|
| PD10M440H | NIEC |
获取价格 |
MOSFET MODULE DUAL 85A 450V/500V |
|
| PD10M440H_1 | NIEC |
获取价格 |
85A 450~500V |
|
| PD10M440L | NIEC |
获取价格 |
70A 450~500V |
|
| PD10M440L_1 | NIEC |
获取价格 |
70A 450~500V |
|
| PD10M441H | NIEC |
获取价格 |
MOSFET MODULE DUAL 85A 450V/500V |
|
 Pickering新高压舌簧继电器亮相汽车测试博览会
Pickering新高压舌簧继电器亮相汽车测试博览会

 采用MCU+MPU双处理器架构实现的创新应用设计探索
采用MCU+MPU双处理器架构实现的创新应用设计探索
 解读L9904TR手册资料:产品概述、主要功能、电气参数
解读L9904TR手册资料:产品概述、主要功能、电气参数
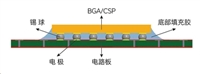 芯片底部填充工艺:提升电子设备可靠性的关键步骤
芯片底部填充工艺:提升电子设备可靠性的关键步骤
工作时间:9:00-21:00
CEO邮箱:ceo@jiepei.com
投诉邮箱:tousu@jiepei.com





 浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证
浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证



