AMIS-30623 LIN Microstepping Motordriver
Data Sheet
15.3.8. Motor Shutdown Mode ..........................................................................................................................................................38
15.4 Motion detection............................................................................................................................................................................39
16.0 Lin Controller....................................................................................................................................................................................42
16.1 General Description ......................................................................................................................................................................42
16.2 Slave Operational Range for Proper Self Synchronization ...........................................................................................................42
16.3 Functional Description ..................................................................................................................................................................43
16.3.1. Analog Part............................................................................................................................................................................43
16.3.2. Protocol Handler....................................................................................................................................................................43
16.3.3. Electro Magnetic Compatibility ..............................................................................................................................................43
16.4 Error Status Register ....................................................................................................................................................................43
16.5 Physical Address of the Circuit .....................................................................................................................................................43
16.6 LIN Frames...................................................................................................................................................................................44
16.6.1. Writing frames .......................................................................................................................................................................44
16.6.2. Reading frames.....................................................................................................................................................................45
16.6.3. Preparing frames...................................................................................................................................................................45
16.6.4. Dynamic assignment of Identifiers.........................................................................................................................................46
16.7 Commands table...........................................................................................................................................................................47
16.8 LIN lost behavior...........................................................................................................................................................................47
16.8.1. Introduction............................................................................................................................................................................47
16.8.2. Sleep enable .........................................................................................................................................................................47
16.8.3. Fail Safe Motion ....................................................................................................................................................................48
16.8.4. Autonomous motion ..............................................................................................................................................................48
17.0 LIN Application Commands..............................................................................................................................................................51
17.1 Introduction...................................................................................................................................................................................51
17.2 Application Commands.................................................................................................................................................................52
18.0 Resistance to Electrical and Electromagnetic Disturbances.............................................................................................................63
18.1 Electrostatic Discharges ...............................................................................................................................................................63
18.2 Electrical transient conduction along supply lines.........................................................................................................................63
18.3 EMC..............................................................................................................................................................................................63
18.4 Power Supply Micro-interruptions .................................................................................................................................................63
19.0 Package Outline ...............................................................................................................................................................................64
19.1 SOIC-20: Plastic small outline; 20 leads; body width 300mil.
19.2 NQFP-32: No lead Quad Flat Pack; 32 pins; body size 7 x 7 mm.
AMIS reference: SOIC300 20 300G .................................64
AMIS reference: NQFP-32..............................................65
20.0 Soldering ..........................................................................................................................................................................................66
20.1 Introduction to Soldering Surface Mount Packages ......................................................................................................................66
20.2 Re-flow Soldering..........................................................................................................................................................................66
20.3 Wave Soldering.............................................................................................................................................................................66
20.4 Manual Soldering..........................................................................................................................................................................66
21.0 Company or Product Inquiries..........................................................................................................................................................67
22.0 Document History.............................................................................................................................................................................67
AMI Semiconductor – June 2006, Rev 3.0
4
www.amis.com

 5秒后页面跳转
5秒后页面跳转


 STM32F030C6芯片介绍:主要参数分析、引脚配置说明、功耗及封装
STM32F030C6芯片介绍:主要参数分析、引脚配置说明、功耗及封装

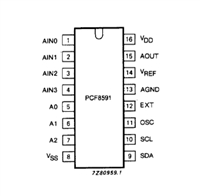 PCF8591数据手册解读:参数、引脚说明
PCF8591数据手册解读:参数、引脚说明
 一文带你了解ss8050参数、引脚配置、应用指南
一文带你了解ss8050参数、引脚配置、应用指南
 深入解析AD7606高性能多通道模数转换器:资料手册参数分析
深入解析AD7606高性能多通道模数转换器:资料手册参数分析





 浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证
浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证








