
 5秒后页面跳转
5秒后页面跳转

| 型号 | 品牌 | 描述 | 获取价格 | 数据表 |
| ADA4610-1 | ADI | Rail-to-rail output |
获取价格 |

|
| ADA4610-1_16 | ADI | Low Noise, Precision, Rail-to-Rail Output, JFET Single/Dual/Quad Op Amps |
获取价格 |
|
| ADA4610-1ARJZ-R2 | ADI | Low Noise, Precision, Rail-to-Rail Output, JFET Single/Dual/Quad Op Amps |
获取价格 |
|
| ADA4610-1ARJZ-R7 | ADI | Low Noise, Precision, Rail-to-Rail Output, JFET Single/Dual/Quad Op Amps |
获取价格 |
|
| ADA4610-1ARJZ-RL | ADI | Low Noise, Precision, Rail-to-Rail Output, JFET Single/Dual/Quad Op Amps |
获取价格 |
|
| ADA4610-1ARZ | ADI | 暂无描述 |
获取价格 |
|
 STM32F030C6芯片介绍:主要参数分析、引脚配置说明、功耗及封装
STM32F030C6芯片介绍:主要参数分析、引脚配置说明、功耗及封装

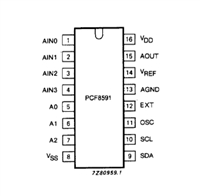 PCF8591数据手册解读:参数、引脚说明
PCF8591数据手册解读:参数、引脚说明
 一文带你了解ss8050参数、引脚配置、应用指南
一文带你了解ss8050参数、引脚配置、应用指南
 深入解析AD7606高性能多通道模数转换器:资料手册参数分析
深入解析AD7606高性能多通道模数转换器:资料手册参数分析
工作时间:9:00-21:00
CEO邮箱:ceo@jiepei.com
投诉邮箱:tousu@jiepei.com





 浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证
浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证








