
 5秒后页面跳转
5秒后页面跳转

| 生命周期: | Obsolete | 零件包装代码: | LCC |
| 包装说明: | QCCJ, | 针数: | 44 |
| Reach Compliance Code: | unknown | HTS代码: | 8542.31.00.01 |
| 风险等级: | 5.74 | 地址总线宽度: | 8 |
| 边界扫描: | NO | 最大数据传输速率: | 0.125 MBps |
| 外部数据总线宽度: | 8 | JESD-30 代码: | S-CQCC-J44 |
| 长度: | 16.25 mm | 低功率模式: | YES |
| 串行 I/O 数: | 1 | 端子数量: | 44 |
| 最高工作温度: | 125 °C | 最低工作温度: | -55 °C |
| 封装主体材料: | CERAMIC, METAL-SEALED COFIRED | 封装代码: | QCCJ |
| 封装形状: | SQUARE | 封装形式: | CHIP CARRIER |
| 认证状态: | Not Qualified | 筛选级别: | MIL-PRF-38535 Class V |
| 座面最大高度: | 4.95 mm | 最大供电电压: | 5.5 V |
| 最小供电电压: | 4.5 V | 标称供电电压: | 5 V |
| 表面贴装: | YES | 技术: | CMOS |
| 温度等级: | MILITARY | 端子形式: | J BEND |
| 端子节距: | 1.27 mm | 端子位置: | QUAD |
| 宽度: | 16.25 mm | uPs/uCs/外围集成电路类型: | SERIAL IO/COMMUNICATION CONTROLLER, LAN |
| Base Number Matches: | 1 |
| 型号 | 品牌 | 描述 | 获取价格 | 数据表 |
| 5962-03A0601VXX | WEDC | LAN Controller, 1 Channel(s), 0.125MBps, CMOS, CQCC44, 17.14 X 17.14 MM, 1.27 MM PITCH, CE |
获取价格 |

|
| 5962-03A06QXC | ATMEL | CAN Controller for Space Application |
获取价格 |
|
| 5962-03A06VXC | ATMEL | CAN Controller for Space Application |
获取价格 |
|
| 5962-03B0103QXX | ACTEL | Field Programmable Gate Array, 44000 Gates, CMOS, FP-100 |
获取价格 |
|
| 5962-03B0103V5C | ACTEL | Field Programmable Gate Array, 44000 Gates, CMOS, QFP-132 |
获取价格 |
|
| 5962-03B0103VXX | ACTEL | Field Programmable Gate Array, 44000 Gates, CMOS, FP-100 |
获取价格 |
|
 STM32F030C6芯片介绍:主要参数分析、引脚配置说明、功耗及封装
STM32F030C6芯片介绍:主要参数分析、引脚配置说明、功耗及封装

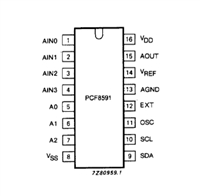 PCF8591数据手册解读:参数、引脚说明
PCF8591数据手册解读:参数、引脚说明
 一文带你了解ss8050参数、引脚配置、应用指南
一文带你了解ss8050参数、引脚配置、应用指南
 深入解析AD7606高性能多通道模数转换器:资料手册参数分析
深入解析AD7606高性能多通道模数转换器:资料手册参数分析
工作时间:9:00-21:00
CEO邮箱:ceo@jiepei.com
投诉邮箱:tousu@jiepei.com





 浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证
浙公网安备 33010502006866号 浙ICP备10014259号-119
营业执照ICP证








